| 研究期間 | 2017/4/1 - 2020/3/31 |
| 研究課題名 | 【終了】空気圧駆動系を用いたリハビリ支援システムの開発 |
| カテゴリー | 全てのクラスター、研究クラスター一覧、医学、終了した研究クラスター、臨床、工学、機械 |
| SDGs | |
| 応募課題 | |
| クラスター長氏名 | 高岩 昌弘(大学院社会産業理工学研究部、機械システム制御学、教授) |
| 所属する研究者氏名 | 高岩 昌弘(徳島大学大学院社会産業理工学研究部機械システム制御学・教授・ロボット工学) 加藤 真介(徳島大学病院リハビリテーション部・教授・リハビリテーション,整形外科) 藤澤 正一郎(徳島大学大学院社会産業理工学研究部人間適応工学・教授・福祉工学) |
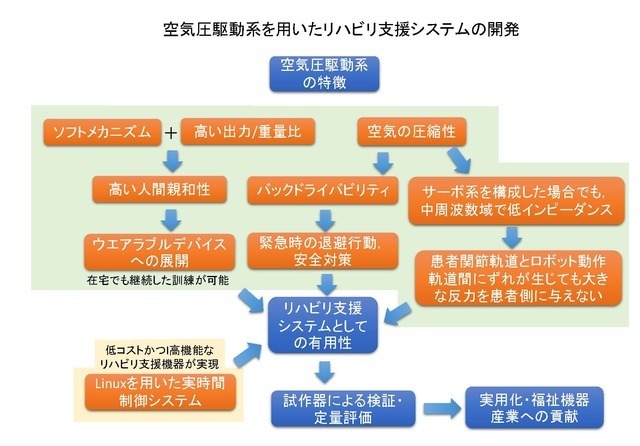
| 研究概要 | 2050年に老年人口の割合が35%に達すると見込まれ、本格的な高齢社会を迎えている我が国において,高齢者の生活の質の維持・向上は解決すべき重要な課題である。高齢社会は相対的に若年労働力不足を意味し,介護・福祉分野へのロボットの導入は必要不可欠である。一方,国の医療費削減に向け,病院施設内だけでなく在宅でも継続して使用可能なリハビリ支援機器の開発も強く望まれている。
上記のように人と直接接触して動作する支援機器のアクチュエータには柔軟性と安全性が担保されている必要がある。空気圧アクチュエータは動作媒体である空気の圧縮性により,柔軟性を有するとともにバックドライブ特性が緊急回避等の安全動作としても機能する。研究代表者はこれまで空気圧駆動系を用いた人間支援システムの開発を継続して実施しており,専門医の意見をフィードバックしながら,これまで得られた知見をもとに上記テーマに関する研究開発をすすめていく。 |
| 研究概要図 | |
| 研究者の役割分担 | 高岩 昌弘:研究の指導と分析,リハビリ機器開発・統括 加藤 真介:研究の指導と分析,リハビリ訓練機器開発の助言,訓練動作の実施 藤澤 正一郎:研究の指導と分析,リハビリ訓練効果の評価 |