| 研究期間 | 2020/4/1 - 2021/3/31 |
| 研究課題名 | 【終了】次世代看護・介護用知的対話ロボットの開発 |
| カテゴリー | 全てのクラスター、研究クラスター一覧、医学、終了した研究クラスター、選定クラスター、保健、工学、情報、機械 |
| SDGs | 3.保健 9.イノベーション |
| 応募課題 | |
| クラスター長氏名 | 任 福継(大学院社会産業理工学研究部、理工学域知能情報工学、教授) |
| 所属する研究者氏名 | 大学院社会産業理工学研究部 准教授 松本 和幸 大学院社会産業理工学研究部 講師 西出 俊 大学院社会産業理工学研究部 助教 康 シン 大学院医歯薬学研究部 教授 谷岡 哲也 大学院医歯薬学研究部 准教授 安原 由子 大学院医歯薬学研究部 助教 飯藤 大和 連携研究者 高知大学医学部 教授 大坂 京子 連携研究者 東海大学工学部 教授 甲斐 義弘 連携研究者 神戸大学大学院システム情報学研究科 准教授 全 昌勤 |
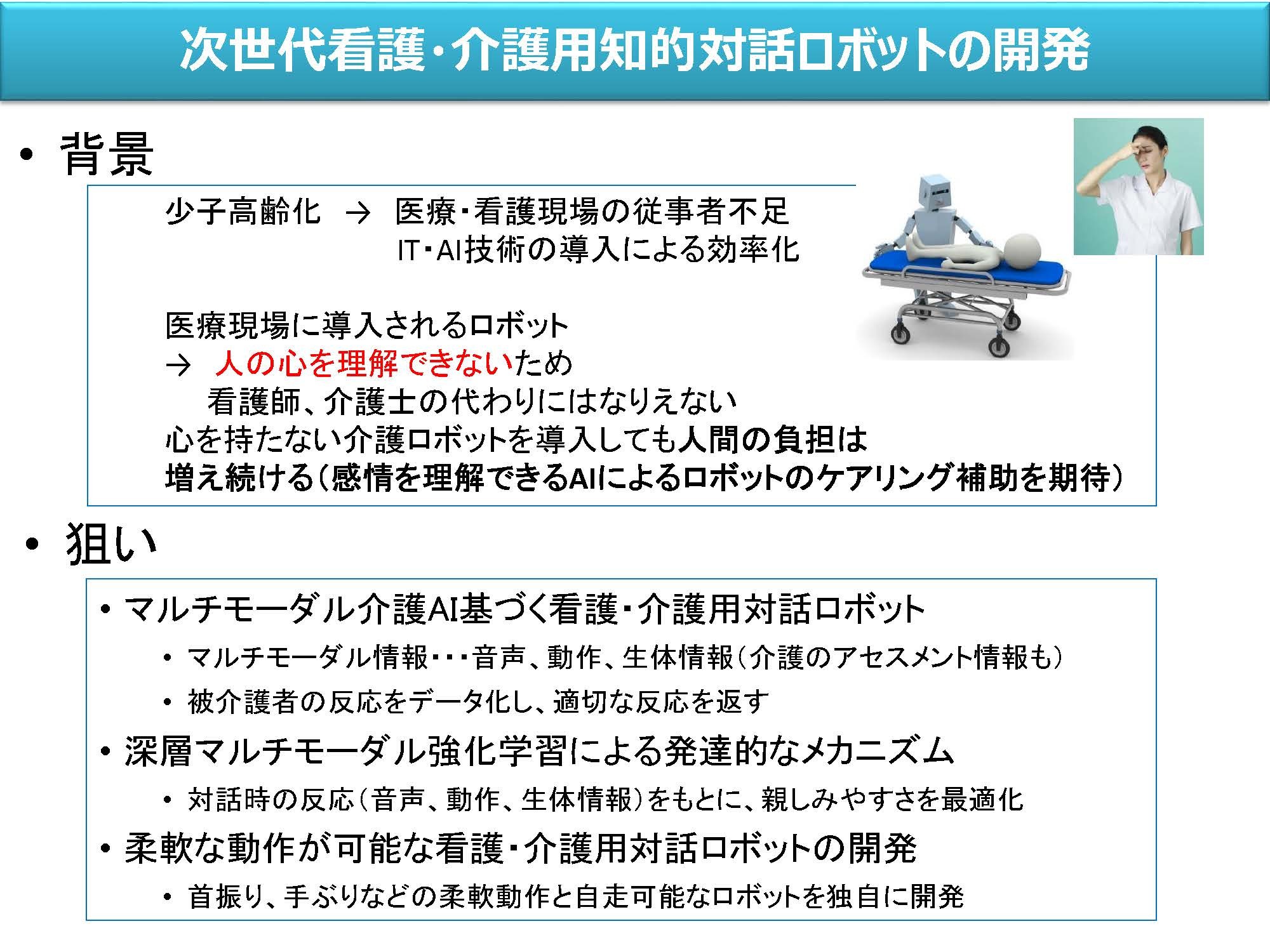
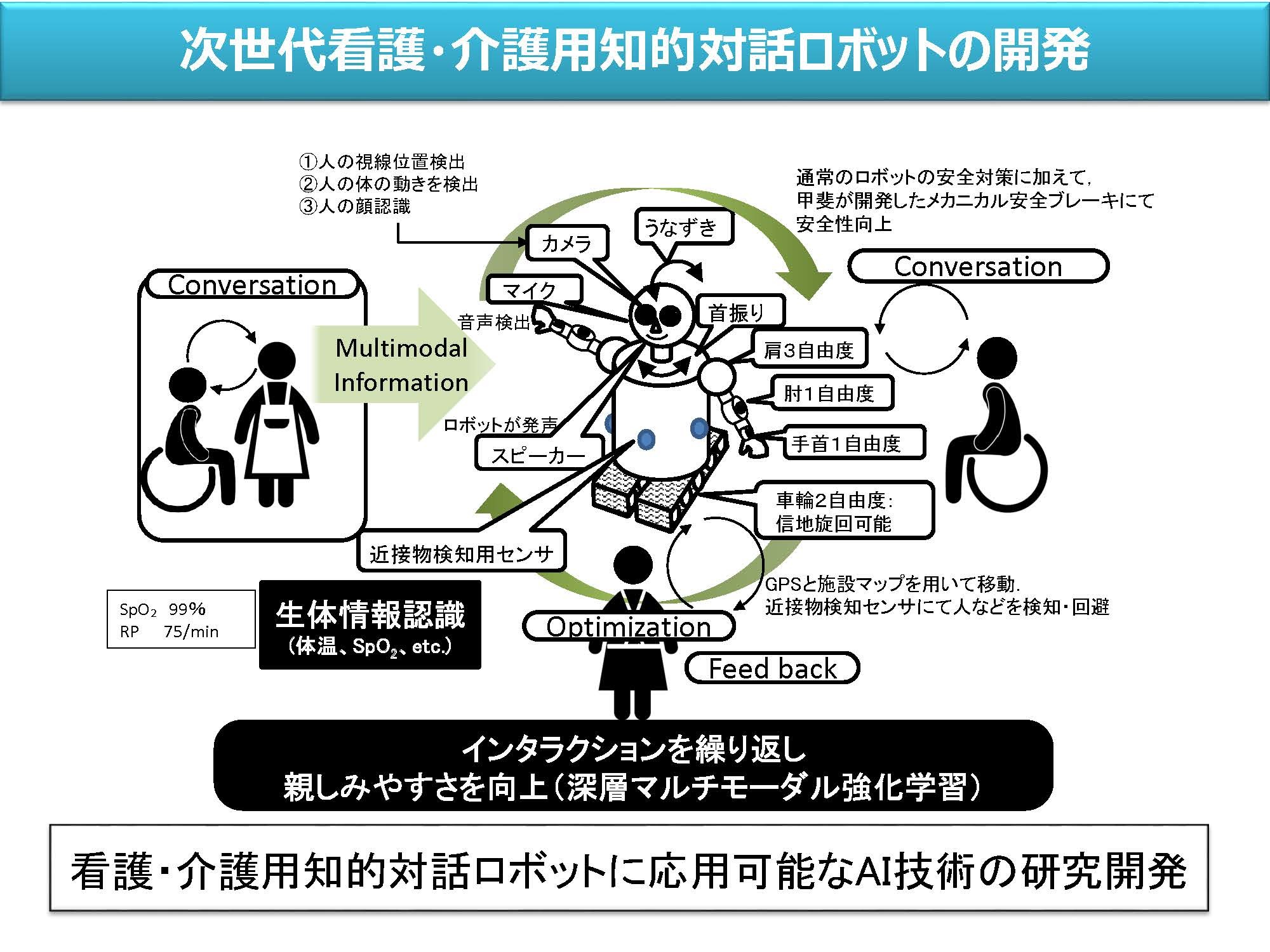
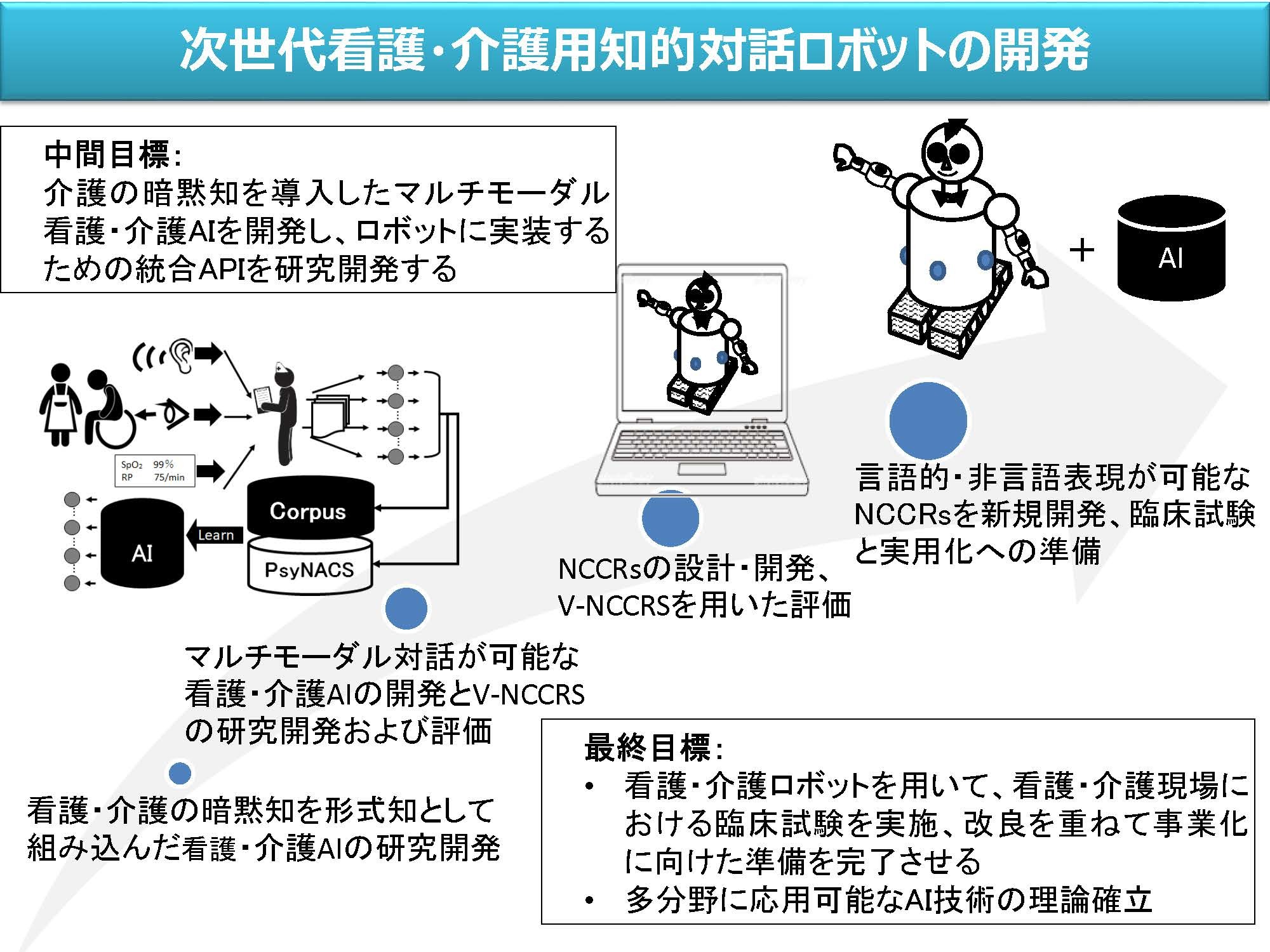
| 研究概要 | 現実の介護では、会話内容だけでなく、声色、表情、動作などを用いてインタラクションをすることで、対峙する相手に対して思いやりを表現することが重要である。そのような人間と同等の相互作用を実現するには、様々なマルチモーダル情報を扱える、親近感を抱かせるロボットが必須である。 しかし単一モーダルの感情認識AI技術を統合する方法では、実環境で利用できるNCCRs(Nursing Care Conversation Robots)を実現することは難しい。またマルチモーダルAIを実現するためには、介護者が被介護者をケアする場面をAIに学習させる必要がある。これには、現実の介護者と被介護者のケアリング場面の相互作用を収録し、データベース化した大規模なコーパスが必要となる。 本研究は、次世代看護・介護用知的対話ロボットの基盤技術開発である。本クラスターがこれまでに研究開発してきた先進的な知能技術を活かし、看護・介護現場におけるデータを常にAIに吸収し、暗黙知を形式知に置き換えることで、学習させ、知的対話ロボットを進化させる基盤技術を開発する。その基盤技術の検証の一つとして、応募者らが研究開発に取り組んでいる高齢者支援のためのロボットのアプリケーションである看護・介護用知的対話ロボット(Nursing Care Conversation Robots: NCCRs)を開発して、開発成果を検証することである。 |
| 研究概要図 | |
| 研究者の役割分担 | 大学院社会産業理工学研究部 教授 任 福継 研究の総括。マルチモーダル感情認識・生成AIの研究開発を行う。特に、大規模感情コーパスによる感情認識・表現に基づく人間・ロボットインタラクションに関する研究を行う。 大学院社会産業理工学研究部 准教授 松本 和幸 本研究開発中のサブテーマ「マルチモーダル介護コーパスの開発」おいて、専門分野である感性情報処理と自然言語処理の研究開発実績を基にコーパス収集・整理・解析の目標を達成するための研究に従事する。マルチモーダル介護AIの開発において、介護の対話における言語からの感情認識技術の開発、ライブラリ化等を担当する。 大学院社会産業理工学研究部 講師 西出 俊 ロボットの発達な進化アルゴリズムと機械学習を活かした解析を行う。 大学院社会産業理工学研究部 助教 康 シン マルチモーダル看護・介護AIの研究開発において、開発したコーパス整備し、対話エンジンに基づくインタラクションを通して共感的能力を獲得し、ケアリングの現場において親しみやすさを最大化する技術を研究開発する。また、ロボットに実装する予定の統合APIの開発に従事する。 大学院医歯薬学研究部 教授 谷岡 哲也 看護者のケアリングとしての看護に基づいた対話内容を大規模に収集し、教師ラベル付きマルチモーダル感情コーパスを構築する。声・表情情報に対する感情認識・生成技術の開発、生体情報と動作に対する感情認識・生成技術の開発、人型看護ロボットの仮想環境における実証実験を行う。 大学院医歯薬学研究部 准教授 安原 由子 AIに学習させるための看護・介護における対話データベース収集及び、介護の暗黙知を形式知へと変換するための介護ラベルの設計・開発を行う。また、音声認識・合成エンジンを実装した仮想環境での看護・介護ロボットシステムを用いた被験者実験を主に担当する。 大学院医歯薬学研究部 助教 飯藤 大和 AIに学習させるための看護におけるケアリングとしての介護士の暗黙知を形式知として取り込んだ対話データベースの開発を行う。また、アセスメント知識との対応付けをおこなうことで、介護士が、看護・介護ロボットを通して自然言語文に基づき、被介護者の状態を把握できる仕組みについて研究開発する。 連携研究者 高知大学医学部 教授 大坂 京子 看護者のケアリングとしての看護に基づいた対話内容を介護の現場において大規模に収集し、教師ラベル付きマルチモーダル介護コーパスを構築する。生体情報と動作に対するAIの動作生成技術の研究開発及び評価、仮想ロボットシステムと実ロボットを用いた実証試験を主に担当する。 連携研究者 東海大学工学部 教授 甲斐 義弘 主にロボットのハードの設計・開発を担当する。また、癖、しぐさによるロボットの動作生成技術の開発、人の作業や人と機械の協働作業を学習する技術や、人の作業も考慮に入れた機械の行動計画技術の開発、介護者の負担軽減 及び被介護者の意思や満足度を尊重した生活を実現するシステムの設計開発も行う。 連携研究者 神戸大学大学院システム情報学研究科 准教授 全 昌勤 マルチモーダル感情コーパス構築のためのフレームワークの開発とコーパス構築、マルチモーダル情報を統合した時系列を考慮した感情認識および生成可能なAI開発を行う。 |